












")












Para operar de manera eficiente en entornos urbanos, los robots móviles y otros sistemas autónomos deben poder moverse con seguridad en las aceras y evitar colisiones con peatones u otros obstáculos. Esto es particularmente cierto para los robots o sistemas de reparto que están específicamente programados para circular por entornos urbanos. nvestigadores del Instituto de Tecnología de Georgia y la Universidad de Stanford han desarrollado recientemente AlienGo, un robot cuadrúpedo que puede seguir rutas específicas generadas por los servicios de mapas públicos mientras permanece en las aceras y evita colisiones con obstáculos o humanos.
Este robot, presentado en un artículo publicado previamente en arXiv, se basa en un nuevo marco de aprendizaje de dos etapas de alto rendimiento para una navegación segura por las aceras.
«Dado que durante el entrenamiento el robot nunca ha visto ninguna imagen de acera del mundo real y dadas todas sus complejidades, el rendimiento sin ninguna adaptación fue notable«
«Como parte de este proyecto, desarrollamos un robot cuadrúpedo inteligente que puede navegar por las aceras en el mundo real«, comenta Sehoon Ha, uno de los investigadores que llevó a cabo el estudio. «Nuestro trabajo se inspira en dos ejes del trabajo existente: conducción autónoma y navegación con robots en interiores. Sin embargo, dado que la navegación por aceras al aire libre normalmente se lleva a cabo en entornos no estructurados con una amplia variedad de peatones y obstáculos sin carriles guía, también propusimos un conjunto de técnicas de aprendizaje y algoritmos para resolver estos desafíos específicos«.
Inicialmente, el equipo entrenó una red neuronal artificial para navegar en entornos sencillos de aceras en simulaciones. Este primer algoritmo, denominado «experto», se entrenó utilizando un simulador de mundos salientes de alta velocidad y se le dio acceso al llamado «estado privilegiado» de la simulación.
Posteriormente, esta red «experta» transfirió el comportamiento aprendido a un algoritmo «estudiante» en una simulación de alta fidelidad. En última instancia, esta red de «estudiantes» produjo observaciones de sensores realistas que se parecían a imágenes de aceras del mundo real.
«El ‘estudiante’ utiliza una red de características semánticas entrenadas a medida para generar abstracciones que luego se utilizan para controlar el robot», comenta Maks Sorokin, otro investigador involucrado en el estudio. «Este enfoque se basa en nuestra experiencia de que el comportamiento deseado es difícil de obtener utilizando un entrenamiento ingenuo de principio a fin, simplemente porque el problema es demasiado difícil«.
AlienGo ha superado las expectativas
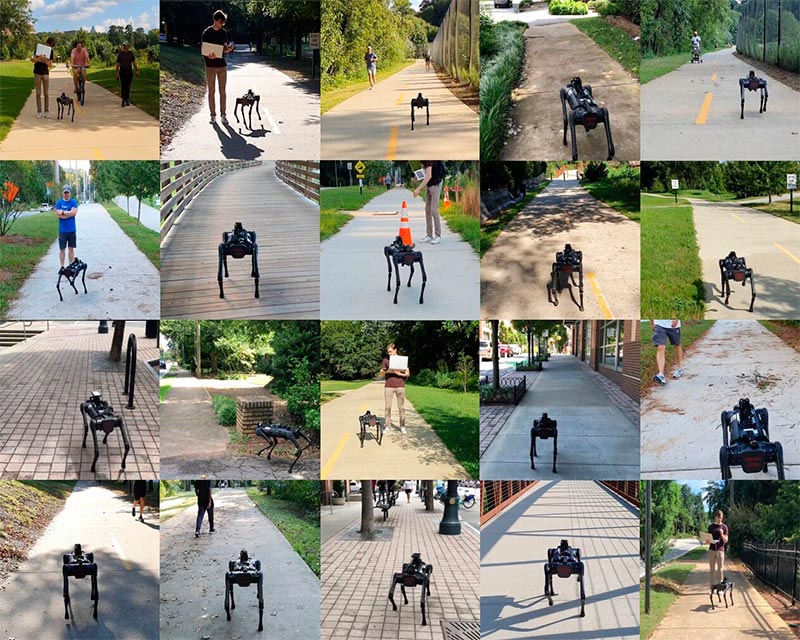
Utilizando el marco de aprendizaje de dos etapas que desarrollaron, Ha, Sorokin y sus compañeros de investigación pudieron lograr una política eficaz utilizando información «privilegiada» en la simulación y luego transferir los comportamientos adquiridos por el marco a un robot real de cuatro patas. Cuando el equipo evaluó el marco, encontraron que superaba a otros modelos de vanguardia para la navegación en aceras. Luego también probó su marco en un entorno del mundo real, aplicándolo al robot AlienGo mientras navegaba por las aceras en Atlanta.
«Además de las ganancias de rendimiento del uso del aprendizaje en dos etapas con el mundo abstracto, fue sorprendente ver lo fácil que fue la transferencia al mundo real con nuestro aumento y curación de datos«, agrega Sorokin. «Dado que durante el entrenamiento el robot nunca ha visto ninguna imagen de acera del mundo real y dadas todas sus complejidades, el rendimiento sin ninguna adaptación fue notable, por decir lo mínimo. Nuestros hallazgos podrían implicar que gran parte del trabajo reciente del aprendizaje en robótica podría transferirse al mundo real y, con suerte, utilizarse en la práctica para beneficiar a la humanidad«.
Otros retos: el cruce de carreteras, el manejo dinámico de obstáculos y la interacción con objetos del mundo real y humanos
En el futuro, el robot cuadrúpedo desarrollado por este equipo de investigadores podría usarse para completar una variedad de tareas, como entregar paquetes o controlar visualmente entornos urbanos. Además, el marco que desarrollaron podría aplicarse a otros robots móviles existentes o emergentes para mejorar su capacidad para moverse por las aceras.
«Si bien hicimos un gran progreso en la transferencia de simulador a real para la navegación, todavía quedan muchos desafíos«, concluye Sorokin. «Algunos de los desafíos relacionados con la navegación que aún debemos superar incluyen el cruce de carreteras, el manejo dinámico de obstáculos y la interacción con objetos del mundo real y humanos. Sin embargo, nuestro enfoque no se limita a la navegación, podría potencialmente aplicarse en muchos sistemas robóticos con aplicaciones como manipulación, locomoción y otras. Estamos emocionados de ver sus aplicaciones en áreas de investigación adyacentes«.
Fuente: Cornell University.
